The first step to building a butler robot is to construct a chassis.
The chassis is probably the most important part of the robot. If this fails than the entire robot is practically pointless. This is the foundation of the robot. The chassis is the mode of transportation of the robot.
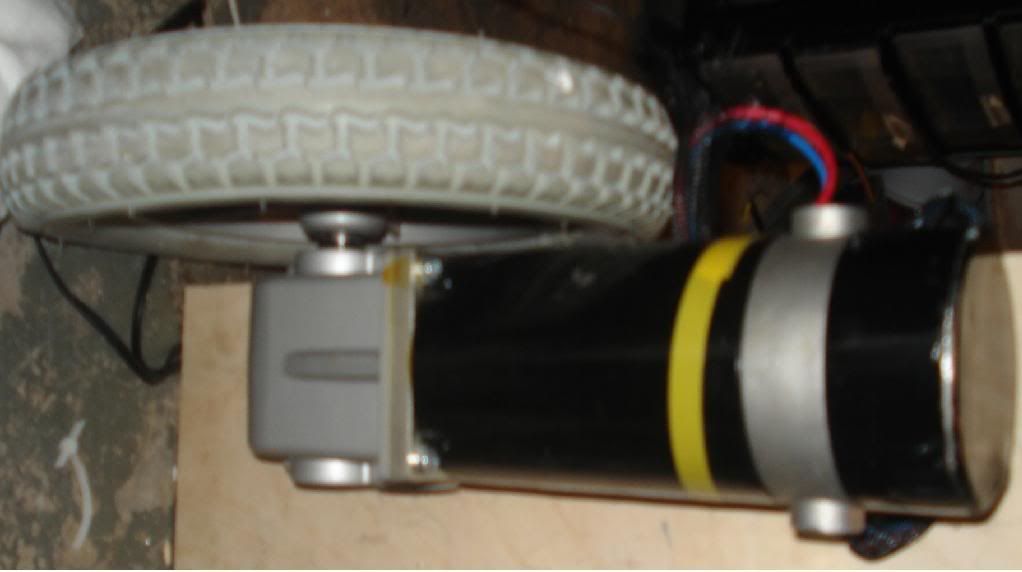
For motors I decided to use preowned wheelchair motors since they were pretty cheap ( ~$70 on eBay) and since they can handle a very heavy load .
What to ask when buying a wheelchair motor:
- Do the motors actually work?
- Do the motors come with wheels attached?
- Do they draw more than 15 amps per hour?
- Do they have too high RPM? ( this is relative to your application )
- Do the motors have bad gears that make a lot of noise when turning?
RPM stands for rounds per minute. Now lets examine that further. That means that at 1 RPM a 12" wheel will turn exactly once , which also means that the wheel traveled 12". Now if that number was higher , say 60 RPM , then that would mean the robot would travel 12" per second. Now for me thats too fast , but it all depends how fast you need it to go.
STEP 1: Choosing the right material
The material we need for the chassis needs to be strong and able to support massive pounds. I went along with wood , though plexiglass will be okay. Make sure you use 3/4" thick wood . Any thinner will not really support the weight. 1" is okay also, but its just extra weight.


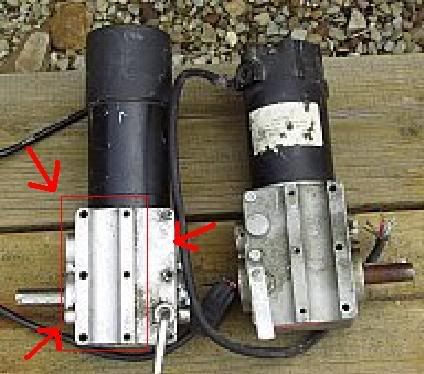
STEP 2: Mounting the Motors
You then mount each wheelchair motor to a piece of wood or plexiglas using the mounting holes as shown in the picture. Use washers and the appropriate sized thread when securing the motors to the material. Try to align the sides of the motors with the wood so that the wheels are aligned straight.

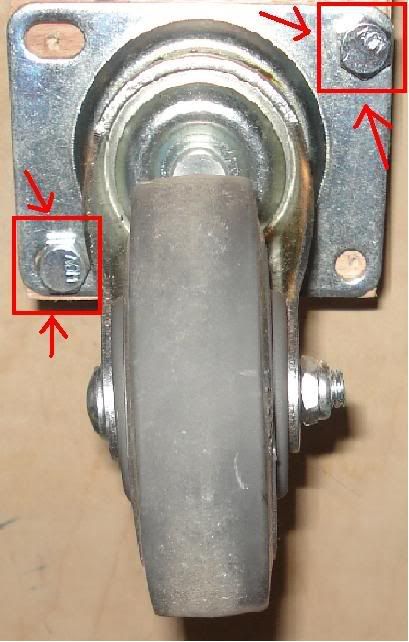
STEP TWO: Mount the Caster Wheel
Get a caster that can support 250 pounds . I purchased one from Home Depot, but any caster that can support 250 lbs. is good.

Attach the caster to the base as shown in the picture.
Now you should have a base looking something like this:
A Sketchup CAD of the base can be found here

CHASSIS IS COMPLETE!
2 comments:
Eric, reading eagerly! Wanted to clarify that a 12" diameter wheel will travel 12 x pi in one revolution so about 37.7" ... hope this helps.
thanks shimniok
nice to see people reading my work!
I'll add it in to the tutorial sometime tomorrow, im writing a reminder write now.
you can always email me if you would like to chat about robotics
airman00 at gmail.com
Post a Comment