I will be building a line following robot for a competition and I'll use a CMUcam to do vision processing.
Heres some basic pseudo code for line following with vision:
Locate Middle Mass of Line
Turn scan servo till CMUcam is aligned with middle mass
Have chassis align with CMUcam "head"
Go Forward if Middle mass is aligned with CMUcam
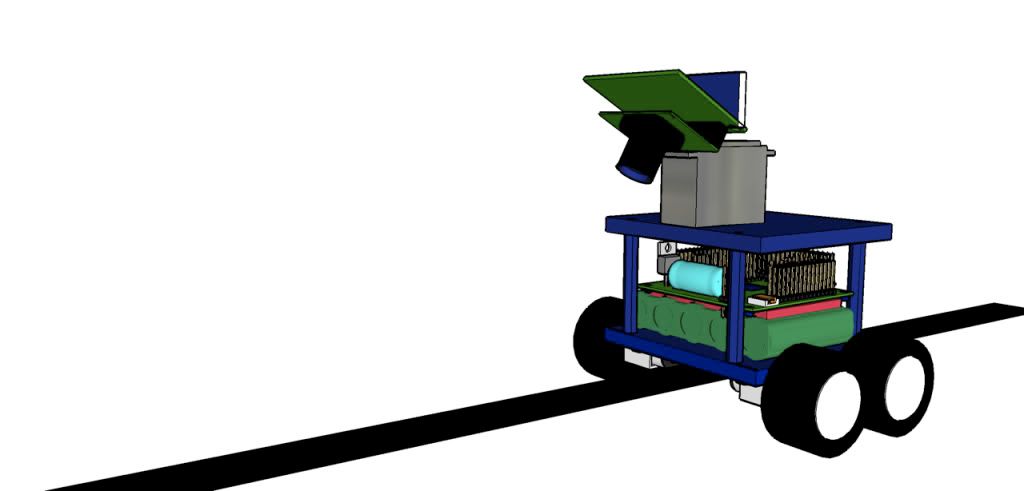
The line following robot with vision uses a CMUcam , four 150:1 Micro Metal Gearmotor HP motors , Axon microcontroller, 6V NiMH battery pack, and one panning servo for the camera. Chassis is HDPE (spray painted blue) and is two decker - deck supported by four hex spacers.
I haven't decided yet if I am going to make a step-by-step tutorial or just documentation. Also I'll be making a tutorial on interfacing the CMUcam to the Axon.
More updates to follow.
1 comment:
Wow !!...I really liked your post...good work...do check out my blog at http://robots4all.blogspot.com and write in your comments there !!
Post a Comment